

Unmanned Aerial Vehicles for Natural Emergency Monitoring
Airborne means play a critical role in the management of natural emergencies. The collection of information for building prediction and behaviour modes, the transportation of material and brigades, search & rescue missions, or the assessment of damages are just a few examples. In the last decade, the development of drone technology has unprecedently widened the range of potential applications and uses in emergency management and particularly, in emergency monitoring. The increase of frequency and severity of natural emergencies originated by the climatic change require our best technologies reduce their effect and mitigate their impact. Horizon Europe TEMA project is aware of this challenge and addresses it by extensively combining novel AI and Big Data systems with a wide variety of complementary platforms for data collection. Aerial robots play a critical role in TEMA project making use of fleets of aerial robots as powerful and highly responsive, flexible, and reconfigurable tools to collect information useful for the monitoring, measuring, and assessment of natural emergency situations.
Unmanned Aerial Platforms
Unmanned Aerial Vehicles (UAVs) have been typically classified depending on their flight altitude of operation and endurance. The stratospheric UAVs operate at altitudes between 20.000 and 30.000 m with flight endurance of several weeks. They are based on fixed-wing or blimp platforms are often used for Earth observation sensors. HALE (High Altitude Long Endurance) UAVs typically operate at altitudes around 20.000 m can have significant payload and endurance of several weeks. MALE (Medium Altitude Long Endurance) UAVs operate at altitudes around 14.000 m and their endurance typically ranges between 24 h and 48 h. Instead of using one large and expensive UAV, TEMA focuses on the significantly more cost-effective alternative of using a fleet of smaller UAVs capable of carrying different complementary sensors to provide a more robust multimodal perception of the emergency from several points.
Unmanned aerial platforms have been traditionally classified into fixed-wing platforms, such as airplanes, and rotary-wing platforms, such as helicopters or multi-rotors. The first ones have a more energy-efficient flight (and hence longer endurance) but require infrastructure for take-off and landing (runways) which hamper their responsible operational use in emergency situations. Multi-copters have higher manoeuvrability and can hover to facilitate data collection at specific vantage points, but their flight is less energy-efficient and have significantly shorter endurance, which constrain the area they can cover. In the last decade, hybrid configurations combining fixed and rotary wings have emerged such as the VTOL (Vertical Take-off and Landing) vehicles. They can take off and land using propellers, hence need no runway and have high manoeuvrability, and at the same time can fly in energy-efficient fixed-wing mode with flight endurance of several hours.
UAVs as data collectors for emergency management
Fleets of UAVs enables having multiple flying cameras at different aerial vantage points which provide high flexibility and evident advantages to collect data of interest for emergency management [1]:
- Before the emergency. UAVs are ideal tools for collecting data that are useful for the preventive actions. They can be used to build vegetation maps [2] and to analyse the vegetation biomass and hydric stress using multi-spectral cameras. In contrast to satellite-based remote sensing, UAVs provide higher spatial and temporal resolutions. Fleets of UAVs can be used for forest fire surveillance and detection as well, which have the additional advantage of being effective deterrents against man-caused fires. In floods, UAVs can be used to detect the presence of blockages, sediments or obstructions in rivers and channels.
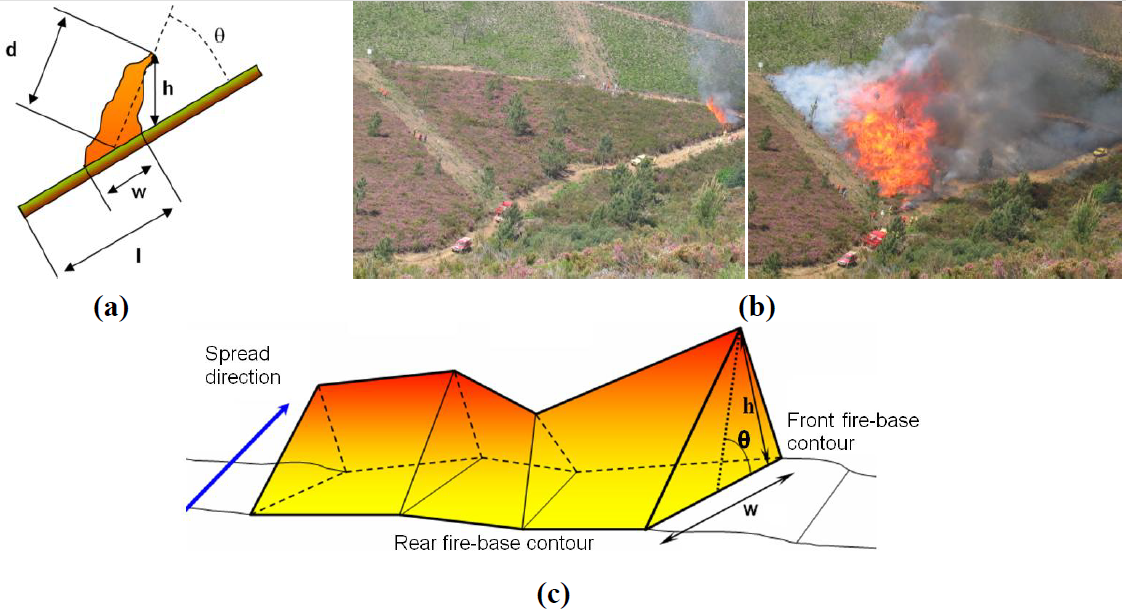
- During emergency. Having accurate and updated information is critical for the emergency management. Fleets of UAVs can be used to collect visual and infrared images that enable measuring the status and monitoring of the emergency. Significant work has been performed in cooperative detection and monitoring of forest fires [3]. Drones equipped with AI and image processing can build in real-time the 3D georeferenced models with status of the fire e.g., position and speed of the fire front [4]. These measurements are not only useful for reactive planning the fire attack. They can be also used to feed forest fire prediction models with actual measurements to improve the accuracy of the predictions, hence enabling the performance of predictive forest fire attack activities. UAVs equipped with visual and infrared cameras can be used to detect persons in search and rescue missions or can monitor the status of roads and paths for facilitating access in search and rescue operations.
- After the emergency. UAVs are effective tools also to monitor the evolution of the area after the disaster including detection of secondary fire points or monitoring of the evolution of the vegetation after the fire, among many others. Again, using fleets of UAVs enables extending the range and increases the robustness of the full information collection system.
Conclusions
Unmanned Aerial Vehicles have wide data collection capacities with high interest in emergency situations. They are an ideal technology to responsibly collect data, and in combination of satellites and in-situ sensors, will be used as main provider of the data that will be analysed with the Big Data and Artificial Intelligence techniques that will be developed in Horizon Europe TEMA project.
Bibliography
[1] C Yuan, Y Zhang, Z Liu, “A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques”, Canadian journal of forest research, 2015
[2] J Paneque, V Valseca, JR Martínez-de Dios, A Ollero, “Autonomous Reactive LiDAR-based Mapping for Powerline Inspection”, 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 962-971, 2022.
[3] L Merino, F Caballero, JR Martínez-de-Dios, I Maza, A Ollero, “An unmanned aircraft system for automatic forest fire monitoring and measurement”, Journal of Intelligent & Robotic Systems 65, 533-548, 2012.
[4] JR Martinez-de Dios, BC Arrue, A. Ollero, L Merino, F Gómez-Rodríguez, “Computer vision techniques for forest fire perception”, Image and vision computing 26 (4), 550-562, 2008.